 加入收藏
加入收藏 加关注
加关注 登录
登录
 注册
注册
 微警用
微警用




机器人使用深度学习来规划和穿越无障碍路径
2020-03-19 16:40:10 来源 : 环球网
关键词:
机器人
警用装备网讯: 过去的项目和研究表明,深度学习是训练机器人做特定事情的有效技术。例如我们已经看到OpenAI使用神经网络训练Dactyl来解魔方,以及一种称为6-DoF GraspNet的算法,该算法可以帮助机器人拾取任意对象。现在加州大学伯克利分校的研究人员创建了伯克利自动驾驶地面机器人(BADGR)。
BADGR是使用自我监督数据训练的端到端自主机器人。与大多数传统的依靠几何数据来规划无碰撞路径的传统机器人不同,BADGR依靠“经验”来穿越地形。
BADGR的核心是Nvidia Jetson TX2,它处理车载摄像头,六自由度惯性测量单位传感器,2D LIDAR传感器和GPS系统。具体来说,BADGR拥有一个人工神经网络,由实时相机传感器的观测结果和一系列未来计划的行动提供反馈。
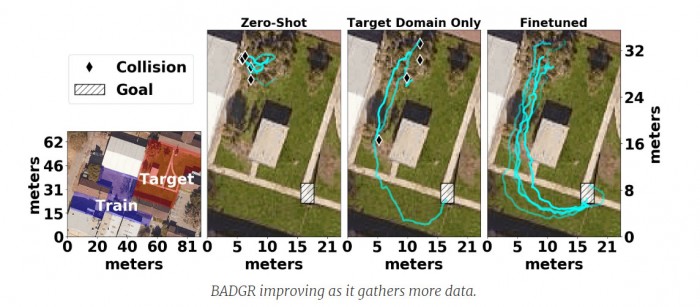
然后,神经网络会预测到达目标的最佳可能路径。与将路径遍历视为几何问题的传统方法相比,此方法具有一个主要优势:传统技术可以避开路径中的高草,而BADGR可以在其中导航。此外,这使BADGR在收集更多数据时得以改善。研究人员指出:BADGR背后的关键见解是,通过直接从现实世界中的经验中自主学习,BADGR可以了解导航能力,随着收集更多数据而不断改进,并推广到看不见的环境。
研究团队表示BADGR的成功提出了一些问题。主要是,机器人将如何在看不见的甚至是敌对的环境中安全地收集数据?BADGR将如何适应有生命障碍(例如步行的人)的动态环境?
相关论文已发表在arXiv上。研究人员还在BADGR的GitHub存储库中发布了其研究成果。
新闻稿件欢迎直接联系:QQ 34004818 微信公众号:cpsjyzb
我要评论
0 条评论
- 还没有人评论过,赶快抢沙发吧!
